Early prototypes
2020-03-08
Idea was to have 2 legged robot. Each leg has 2 degrees of freedom and can be independently connected to vacuum pump to stick to the surface or vented to unstick. Here is an image of an early prototype:
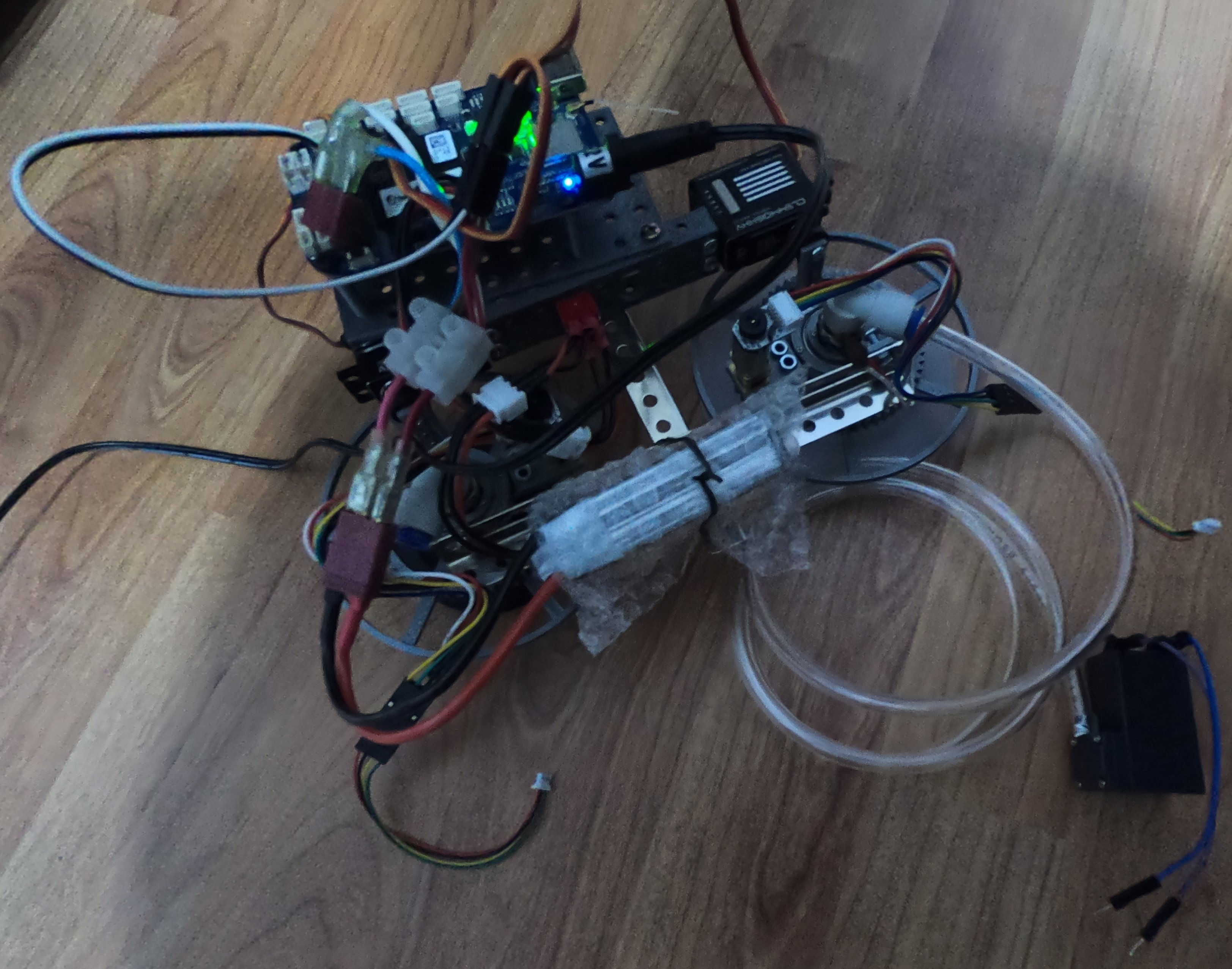
Small and cheap vacuum pump (black box at the bottom right corner) proven to work only on very smooth surfaces like ceramic tile or table. Floating floor and plaster wall proven to be too challenging for a small pump.
40g hobby servo was proven to have insufficient torque therefore 2 servos per axis prototype was made:
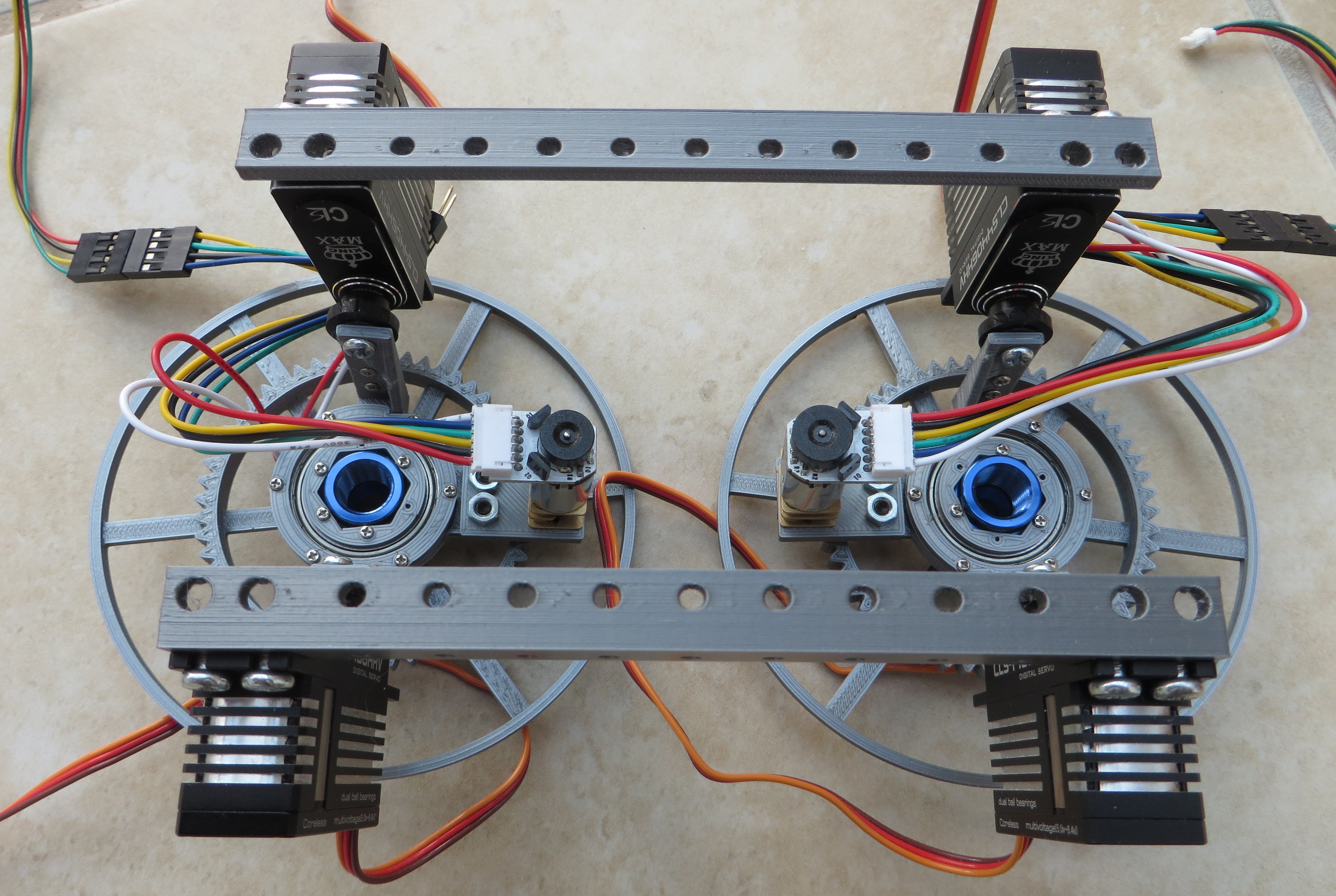
Next image demonstrates another idea to make robot even more versatile:
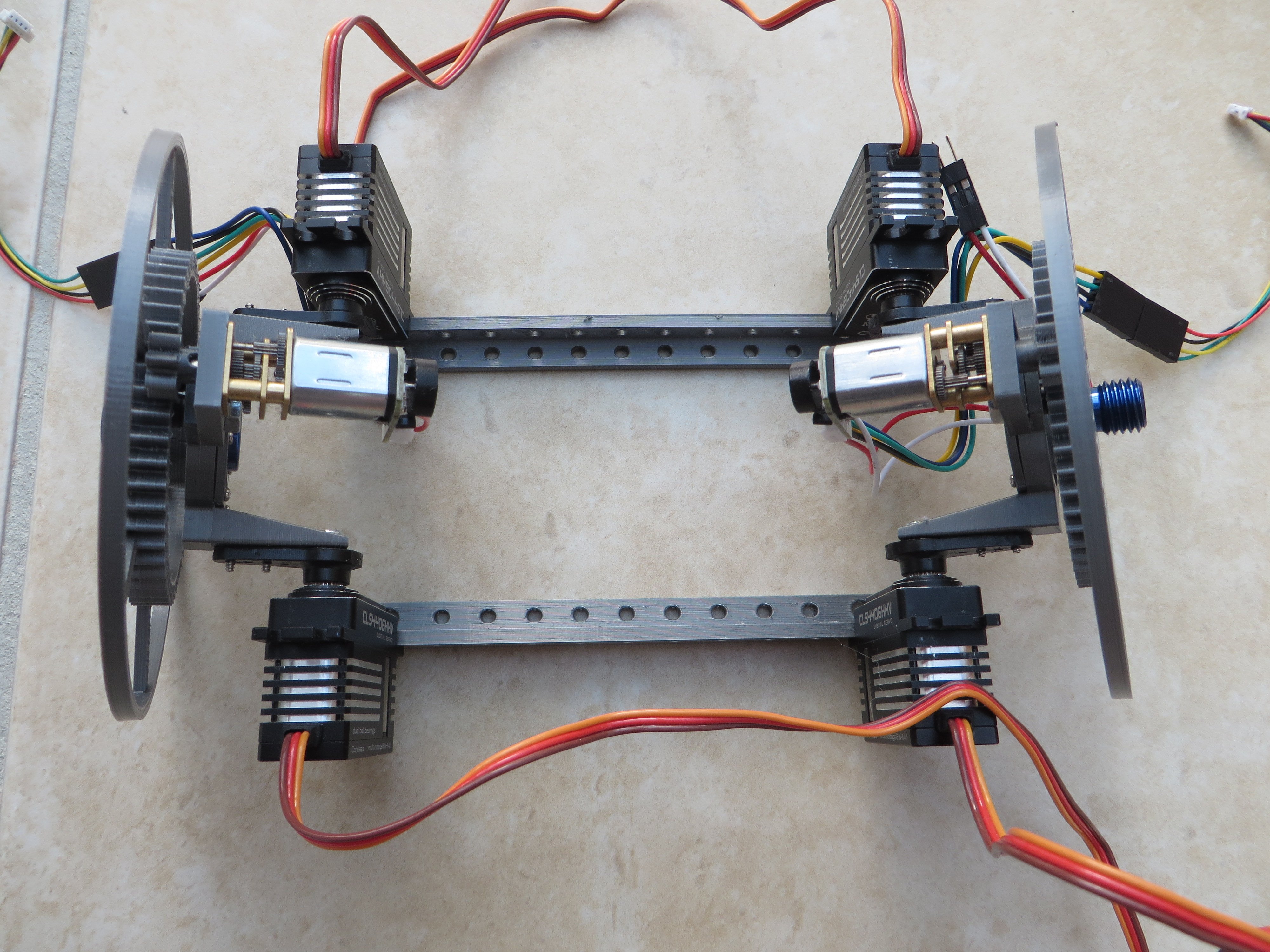
Axis which holds vacuum suction cup (to be attached to blue pipe at center right) can be turned 90 degrees which transforms robot for 2 legs to 2 wheels effectively making it 2 wheel balancing robot.
- Previously:
- Motivation
- Read next:
- The first fully functional version